
Temperature Controller มีฟังก์ชันการควบคุมแบบไหนบ้าง ?
โดยปกติทั่วไปแล้วจุดประสงค์ที่เราใช้เครื่องควบคุมอุณหภูมิ หรือ Temperature Controller นั้นเรานำมาใช้เพื่อควบคุมอุณหภูมิให้ได้ค่าตามที่เราต้องการ หรือรักษาค่าอุณหภูมิไว้ให้คงที่ตลอดการทำงานของระบบการผลิต แต่เราจะรู้ได้อย่างไรว่าเราจะใช้ฟังก์ชันการควบคุมแบบไหน และแต่ละฟังก์ชันการควบคุมมีการทำงานอย่างไรบ้าง ซึ่งฟังก์ชันการควบคุมของเครื่องควบคุมอุณหภูมิที่ใช้กันทั่วไปในอุตสาหกรรมจะมีดังนี้ ON-OFF Control, P Control (Proportional Control) และ PID Control (Proportional Integral Derivative Control) เดี๋ยวเราจะมาอธิบายการทำงานของแต่ละฟังก์ชันการควบคุมกัน
ON-OFF Control
เป็นระบบการควบคุมแบบ ON-OFF โดยเครื่องควบคุมอุณหภูมิจะสั่งให้เอาต์พุตทำงานเพียง 2 สภาวะเท่านั้น คือ ON และ OFF เป็นการควบคุมแบบง่าย ๆ ดังนั้นจึงนิยมใช้กันอย่างกว้างขวางในงานควบคุมทางอุตสาหกรรม การที่จะใช้ฟังก์ชันการควบคุมแบบ ON-OFF Control จะต้องยอมรับผลจากการแกว่งของอุณหภูมิได้ เพราะค่าอุณหภูมิจะมีการกระเพื่อมที่ Set point จะมีผลทำให้เอาต์พุตของเครื่องควบคุมอุณหภูมิทำงาน ON และ OFF อยู่ตลอดเวลา สามารถแก้ไขได้โดยกำหนด Hysteresis เพื่อที่จะลดการตัด-ต่อที่เกิดขึ้น แต่ผลเสียคือจะทำให้เกิด Overshoot มากขึ้น
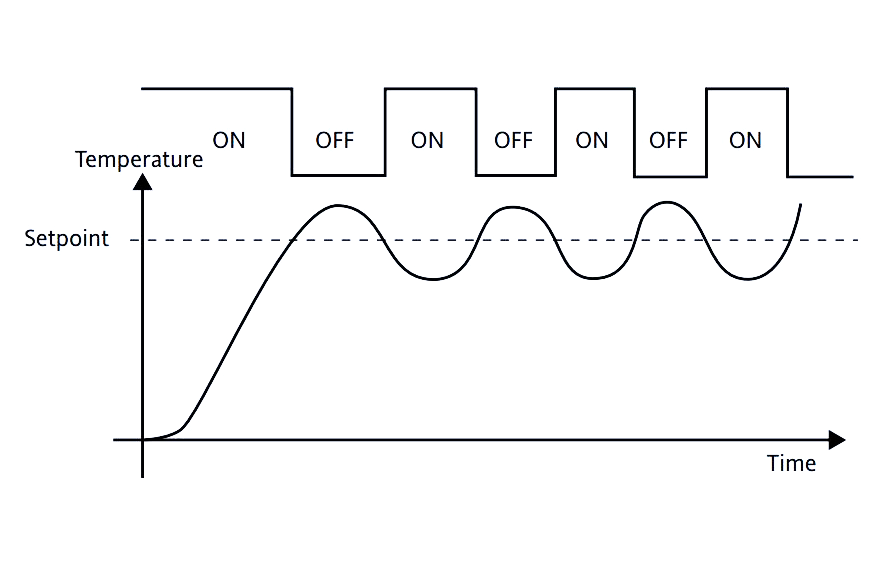
รูปที่ 1 การควบคุมแบบ ON-OFF Control
ที่มา : Principles of PID Control and Tuning | Eurotherm by Schneider Electric
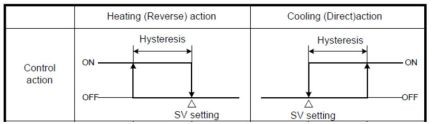
รูปที่ 2 การทำงานของค่า Hysteresis
ที่มา : Using HYSTERESIS with your Temperature Controller | PanasonicElec Blog (wordpress.com)
P Control หรือ Proportional Control
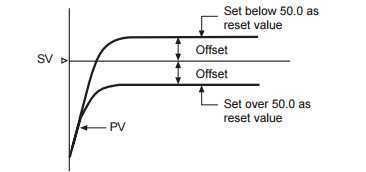
เป็นการควบคุมระบบแบบป้อนกลับโดยใช้ตัวควบคุมแบบสัดส่วน หรืออัตราขยายเป็นกระบวนการควบคุมอุณหภูมิที่ออกแบบมาเพื่อแก้ไขปัญหาของการเกิด Overshoot หรือ Undershoot ของอุณหภูมิ แต่ก็ยังไม่สามารถเข้าสู่ค่า Set Point หรือค่าอุณหภูมิที่ต้องการได้ เนื่องจากมีการเกิด Offset Error ที่สถานะคงตัวของระบบ การที่ระบบนั้นจะตอบสองได้เร็วหรือช้าจะขึ้นอยู่กับค่าของ P Control มีค่ามากก็จะทำให้ระบบตอบสนองได้รวดเร็วยิ่งขึ้น แต่ถ้าค่า P Control มากเกินไประบบจะไม่เสถียร ในทางตรงกันข้ามถ้าค่า P Control มีค่าที่ต่ำระบบควบคุมจะมีผลตอบสนองต่อกระบวนการน้อยตามไปด้วย
PID Control หรือ Proportional Integral Derivative Control
เป็นระบบควบคุมแบบป้อนกลับที่นิยมใช้กันทั่วไป โดยจะทำการคำนวณค่าจากความผิดพลาดของระบบ และค่าที่ต้องการมาคำนวณ ซึ่งฟังก์ชันการควบคุมนี้จะพยายามทำให้ระบบมีค่าผิดพลาดให้เหลือน้อยที่สุดด้วยการปรับค่าตัวแปรที่เป็นสัญญาณทางขาเข้าของฟังก์ชันการควบคุมแบบ PID ซึ่งค่าตัวแปรของการควบคุมแบบ PID จะประกอบไปด้วยส่วนการควบคุมที่สำคัญด้วยกัน 3 ส่วน ดังนี้
- P (Proportional control action) ใช้เพิ่มความเร็วในการตอบสนองของระบบ ลดค่าความผิดพลาดที่สภาวะอยู่ตัวของระบบ
- I (Integral control action) ลดค่าความผิดพลาดที่สถานะอยู่ตัวของระบบให้น้อยลงจนหมดไป มีผลให้ความเร็วในการตอบสนองของระบบลดลง ทำให้เสถียรภาพของระบบลดลง
- D (Derivative control action) ทำให้ระบบมีเสถียรภาพมากขึ้น เพิ่มค่าอัตราส่วนความหน่วงให้กับระบบ
ค่าตัวแปรของ PID ที่ใช้จะปรับเปลี่ยนตามธรรมชาติของระบบ สามารถหาค่าตัวแปรของ PID ได้จากสมการด้านล่าง

โดยตัวแปรแต่ละตัวจะอธิบายได้ดังนี้
u(t) คือ สัญญาณเอาต์พุตของตัวคอนโทรลเลอร์ที่เวลา t
Kp คือ ค่า Proportional Gain
Ki คือ ค่า Integral Gain
Kd คือ ค่า Derivative Gain
E คือ ค่า error ที่เกิดจาก SV-PV
t คือ ค่าเวลาในขณะนั้น
τ คือ ผลรวมของตัวแปร error ตั้งแต่เวลา 0 – t
โดยจะแสดงการใส่ค่า Kp, Ki, Kd ในกราฟได้ดังนี้
กราฟของการควบคุมในกรณีที่มีการเปลี่ยนแปลงค่าตัวแปร P, I และ D
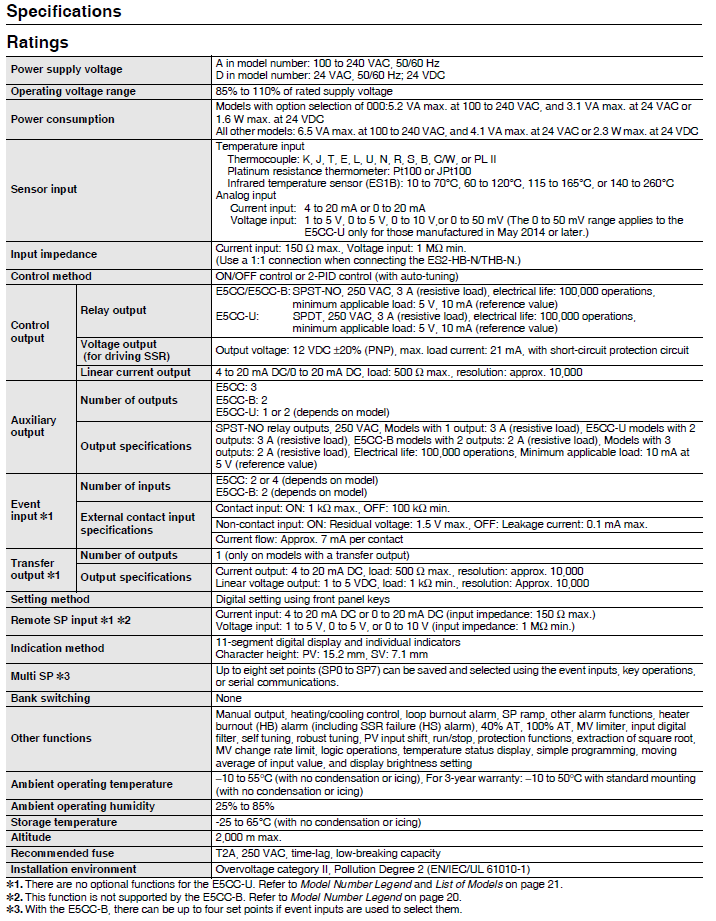
โดยเครื่องควบคุมอุณหภูมิ หรือ Temperature Controller ของแบรนด์ Omron รุ่น E5CC นั้นมีฟังก์ชันการควบคุมทั้ง ON-OFF Control และ PID Control ทั้งสองแบบในตัวเดียวให้เลือกใช้งานตามสเปคด้านล่างนี้ หวังว่าบทความนี้จะเป็นประโยชน์ต่อผู้ที่เข้ามาศึกษาฟังก์ชันการควบคุมของเครื่องควบคุมอุณหภูมินะครับ

เครื่องควบคุมอุณหภูมิ Temperature Controller แบรนด์ OMRON
ที่มา : E5CC, E5CC-B, E5CC-U Digital Temperature Controller (48 x 48 mm)/Features | OMRON Industrial Automation
Related Posts




